Roadholding grip and the racing line
Tight Corners
Author: Bob Carter
Greenpower racing is different to televised motorsport in general in one key respect: the accelerating capability of the cars is very low. The following rule is generally true in all forms of racing but particularly so for greenpower:
It doesn't matter a damn what speed you enter a corner. What matters is the speed you come out.
The speed you exit a corner determines the car speed all the way to the next tight corner. You want to come out of bends at as high a speed as possible.
The Inside Line
The main mistake made by rookie drivers is to aim for the apex of the corner. This inside line is a good place to be if there are a large number of slow cars around. But if you have room around you, you should approach bends from the outside.
The screenshot below is from a YouTube video of a car at the sharp bend coming onto the main pit straight at Croft. This driver is pretty much aiming for the apex of the bend.

The result of this poor car position is that the driver needs to take a tighter radius turn to get round the bend. Below is a drawing of this bend at croft with the largest possible radius turn of the car marked on. You'll see the widest turn he can do has a 14.15metre radius
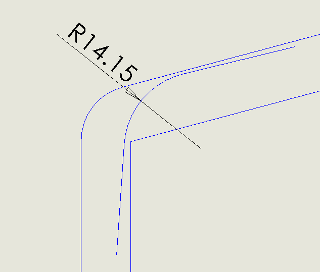
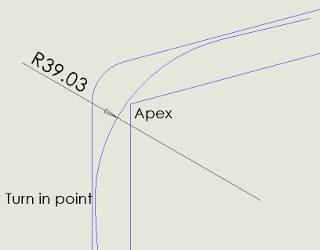
Now consider a driver who has taken the better wide line. It is counter intuitive but allows a much much larger radius turn of the car; up to 39metres!
How does Turn radius affect speed?
All of this used to be called “basic physics”. The grip between 2 surfaces is described by the coefficient of friction. After data logging several accidents we know that the coefficient of friction between a soaking wet road and a Greenpower car tyre is 0.4 exactly. A dry road is between 0.9 and 1.0
Let’s look at the wet road scenario (after all it did rain in the F24+ race at croft....). The downward force (between tyre and road) is \(M \times g\) where g is the acceleration due to gravity on this planet and is numerically equal to 9.81.
So the friction force available to move the car round the bend radius is this force multiplied by the coefficient of friction \(\implies F = M \times 9.81 \times 0.4\)
The sideways acceleration generated by this force would be Force divided by mass \(\implies F = M \times A \quad \therefore A = \frac{F}{M} \implies A = 9.81 \times 0.4\)
Note that the mass has cancelled out. The same sideways acceleration is available regardless of the weight of the car or its weight distribution.
Movement in a circle requires sideways acceleration (centripetal acceleration) and this acceleration is equal to \(\frac{v^2}{R}\) where \(v\) is velocity and \(R\) is bend radius.
Now, lets look at the car on the bad line. His bend radius is \(14.15\:\mathrm{m}\) so
\(\frac{v^2}{14.15} = 9.81 \times 0.4 \implies v^2 = 9.81 \times 0.4 \times 14.15 \implies v = \sqrt{9.81 \times 0.4 \times 14.15} = 7.45\:\mathrm{m/s}\)
so his maximum possible corner exit speed is \(7.45\:\mathrm{m/s} = 16.7\:\mathrm{mph}\)
On the good line corner exit speed could be as high as \(12.37\:\mathrm{m/s} = 27.7\:\mathrm{mph}\)
Convert to miles per hour by multiplying by 3600 (seconds in an hour) and dividing by 1609 (metres in a mile) and the two corner speeds are 16.7mph and 27.7mph respectively. You can see that this is very important, these are the sorts of speeds we actually do.
The car taking the good line will exit the corner over 10mph faster than the same car taking a poor line. It will be 10mph faster all the way down the pit straight.
How do we take advantage of this knowledge?
It takes great skill to pick the right turn in point, but the basic driving line is clear from this analysis and best corner entry speed can be calculated in advance using google maps and calculating for wet or dry conditions.
In truth, under dry conditions most tracks can be taken flat out all the way round if the right line is chosen. But in the wet and in F24+ in particular, a good driver taking the right lines at the right speed can pick up a lot of speed/ distance at no cost – note that the 2 cars described above are both on the same (full) power all the way down the pit straight but one is a full 10mph faster!
And if the driver gets it wrong?
All is not usually lost. Any “sideways action” scrubs speed off better than the heaviest braking, and most race tracks have wide run-off areas by bad bends in case a spin does result. Zebedee used to “understeer” in these circumstances (very safe, would just slow down, frequently ending up on grass or in gravel) but Brian and Dougal are both slightly prone to “oversteer” (i.e. spin). One day we'll find out what Dylan is like, I suspect that it too will oversteer.
So the result of going into a bend too “hot” is that the necessary bend radius to negotiate the bend cannot possibly be achieved, the car skids and slows down a lot until the (now even tighter) necessary bend radius becomes possible. So too fast in = even slower out (and this is bad) or a spin (which is worse...)
And if the driver gets it right?
She will pick up loads of time/distance compared to rivals on the track.
And feel incredibly smug ;^)
Data logs tell us car speed second by second – we will know........