Steering Geometry
Author: Bob Carter
With no suspension, the F24 car steering geometry is simpler than your “full sized” car but many of the same principles apply. The designer can choose what angles and factors to apply and I will try to explain what each factor does and what was chosen for our cars.
Camber Angle
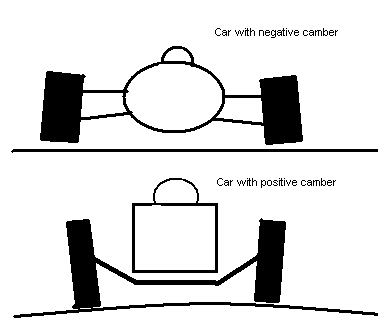
Roads slope down at the edges so that water drains off them. This is called the camber of the road. Very early automobiles were often designed with positive camber, where the tops of the front wheels were further apart than the bottoms. This meant that the tyre tread was square on to the road surface. This practise died out as cornering speeds increased, the cornering forces are trying to roll the tyre off the rim!
Much more recently it has become fashionable with sport and rally cars to have negative camber on the front wheels (tops of the tyres IN compared to the bottoms). The theory here is that as the car rolls in a corner, the outside front tyre will rotate to a near vertical position (which becomes quite important with a wide tyre!). A Greenpower car, with narrow bicycle tyres, and which has no body roll (no suspension) sees no benefit from negative camber unless its tyres are way too soft! I know the Greenpower technical pages say negative camber is a good thing – but it probably isn’t! The main problem is a general problem with a nonvertical tyre, which the load on the contact patch causes the rubber in contact with the road to “squirm” and that must be a waste of energy!
All our cars have zero camber angles.
King pin inclination and scrub radius
The pivot around which the front wheel moves when steering is historically called the king pin. Often in Greenpower cars this steering axis is angled sideways (this angle is called “king pin inclination”) so that the axis of rotation actually passes through the contact patch of the tyre. Such an arrangement is called “centre point steering”. Among full- sized cars, the Mazda MX5 is notable for using centre point steering.
- No “kickback” through the steering if a wheel hits a bump
- Can feel a bit dead
- Tendency for steering to oscillate in the straight ahead position
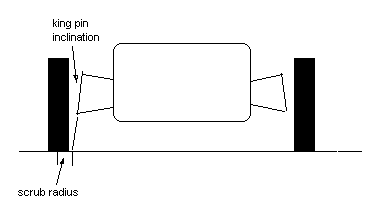
The sideways distance between where the steering axis meets the road and the contact patch of the tyre is called the scrub radius. Among full size cars it is usual to have a small inboard scrub radius (in a ford cortina was up to 40mm) although one or two (e.g. early audi 100) had an outboard scrub radius & claimed it was good for braking stability.
The king pin inclination enables one to engineer a small scrub radius, and imbues a useful self centring tendency when stationary, but moves the wheel away from vertical in corners.
Zebedee had about 25mm scrub radius and about 15o KPI These fairly large angles caused noticeable body roll with a large steering input (onlookers sometimes mistakenly thinking the car was rolling excessively) So these were reduced on Dougal to zero by building a “hub centre steering” system. Dylan has a compromise of 5o KPI and 5mm scrub radius
Castor angle and trail
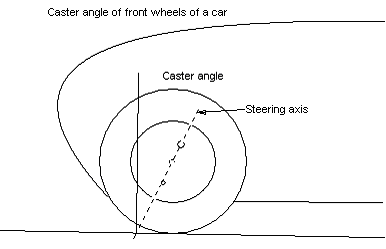
Dynamically self-centring is achieved by having the point where the steering axis hits the road ahead of the tyre contact point. This can be achieved by angling the steering axis backwards when viewed side on (caster angle) or by having the wheel axis behind the steering axis (Trail).
Ironically, the casters on a hostess trolley have zero caster angles, and rely on trail to work!
Full size cars caster angle is usually in the range 5 o to 7 o with no trail. Zebedee had 10o caster angle and 10mm trail. Dougal and Dylan have 7.5o caster and no trail.
Ackermann angle
At last – the important one! This principle was worked out by a German guy Georg Lankensperger (for stagecoaches!) I’ve forgotten his name – it was NOT Ackermann. No, Mr Ackermann was his UK patent agent…
OK whenever you go round a bend, the outside front wheel always describes a larger radius turn than the inside one. So it needs to steer slightly less. Ackermann is a neat way of doing this, by making the steering arms line up with the centre of the back axle.
Strangely, some full sized cars do not have proper Ackermann steering. They are the ones you hear squealing in car parks! Their theory is that the outside tyre is loaded more than the inside, so it should have a larger steering angle. The classical solution, lining up the steering arm pivots with the centre of the back axle is not actually completely right. It is better than nothing but a closer analysis using a fairly simple spreadsheet reveals that about 50% more angle than this actually gives the best results.
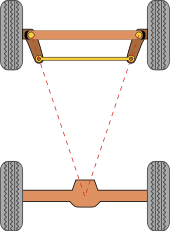
For Greenpower, correct Ackermann steering is Very Important!
Steering Controls
At CAUC we have tried a number of control systems over the years; Blue Bug had a steering wheel; Carbon QT and Maxx Factor had handlebars. Brian and Raptor have both used “tank levers”. These are certainly no better than the other systems, but they do allow the driver in and out without having to have a removable steering column (which inevitably confers undesirable backlash to the system). And in the case of Zebedee, they allow a very low profile car.
Furthermore, we put brakes, throttle and gears on the tank levers too. No pedals. Thus short and tall drivers can use the cars without adjusting anything but the safety harness.
Brakes
All our older cars use bicycle disc brakes on the front wheels. On Blue Bug these were hydraulic but we went over to cable operation because they proved rather high maintenance. Carbon QT, Maxx Factor and Brian all had cable callipers and a “balance lever” to share the braking force between the 2 front wheels. This has worked OK but has been prone to cable binding and requirement of excessive force to achieve reasonable retardation. Zebedee tried the two front wheels’ calipers in series – thus requiring half the force but twice the travel on the brake lever. This worked well enough but was difficult to adjust correctly and later became illegal due to the requirement for redundancy.
Our latest car has gone back to drum brakes (using 90mm Sturmey Archer brakes for bicycles). These are easier to adjust than discs, don't warp and drag less too.
Front or back wheel brakes
This has been discussed on the Greenpower forum. I would argue against the use of rear wheel brakes because a lock-up would cause a spin - period.
Some cars just use a brake on one rear wheel. Such a car won’t spin because the un-braked wheel will keep it straight, but it won’t brake very well!
I appreciate that some cars have a very rearward weight distribution and this would limit the effectiveness of front brakes. Fortunately at CAUC we are not in that position!
Greenpower regulations
The F24 regs state that the car's brakes must be able to resist 300N force. However a team may wish to have better brakes than the minimum specification; particularly if they have a fast car. After a 93metre lockup in the 2013 F24+ final in heavy rain, Dougal was re-engineered to have 4 wheel braking. The required calculations to engineer this safely are detailed in a separate document in this series.
Height of Centre of Gravity
It is usual in the design of a racing car, to try to get the centre of gravity as low as possible. There are 2 main reasons for this:
- A car with a high centre of gravity will see significant weight shifts during braking and acceleration. For us this is a braking issue. The braking force, say 1000N, is applied AT ROAD LEVEL and affects the centre of mass which is some 50cm up. The net result is a torque applied to the whole car pushing the front down and lifting the rear, a torque of 1000N x 0.5m = 500Nm. That’s a lot of torque. A 140kg car may nominally have about 700N pressing down on each axle. If we apply the above torque to the car, and the car has a wheelbase of 1.5m, the force on the front axle increases by 500/1.5N to 1033N. The force on the rear axle reduces by the same amount to 367N. So the weight shift is good news if you have front wheel brakes, bad if you have rear wheel brakes. The car above is limited to significantly less than 0.5G braking with rear brakes (at which point it would do a handbrake turn) but with front wheel brakes it could stop safely at 0.73G.
- A car with a high centre of gravity is more likely to tip over when cornering. If we assume that the tyres are able to generate 1G sideways acceleration when cornering, then for the car to slide (relatively safe) rather than roll (dangerous & costly) the track must be more than double the height of the centre of mass.
So How Do You Measure Height of Centre of Mass?
It’s easy to do this test, load the car up in racing trim (including driver) & see at what angle it balances on the two wheels of one side. If it’s over 47° that’s good! Use a “tiltmeter” smartphone app to do the test. A car following this guideline should only roll over if it hits something.
Note that the very well-engineered “Rotary Racer” rolled when it hit a bump in a bend at Castle Combe and their subsequent investigation revealed their tilt angle was 43° They re-engineered the car to get it up to 47°
Brian had a (difficult to measure) tilt angle just over 50°
Zebedee had a tilt angle of 47° and raced safely for many years at the highest speeds yet seen in Greenpower competition. Dougal had a measured tilt angle (see test on youtube) of 53°
Dylan's tilt angle has not yet been measured but I expect it to be about 60°
So How do the Cars Compare?
Brian is generally easy to drive and well behaved. In the limit it is prone to oversteer, there have been one or two spins.
Zebedee has big KPI and scrub and a very forward weight distribution, making it a very physical car to drive – the drivers really have to work hard in this car. These same traits make it understeer on the limit; Zebedee has never ever spun in spite of probably being the fastest Greenpower car ever.
Dougal has neutral weight distribution, a stiff chassis and a very long wheelbase, making it light, yet stable and responsive to drive. In the limit it remains neutral with a slight tendency to oversteer. It has spun just once, trying to get round the shell building corner at Goodwood at 46mph on a soaking wet track (hint – this is actually impossible....)
Dylan has a slightly smaller wheelbase than Dougal and a wider track – I expect it will behave similarly. Initial driver reports (1 race and no other testing) are that it is “very nice” to drive..